-
シーンから探す
- 特捜最前線 メインライター
- 天気表示 壁掛け時計
- リード 総合 法律 事務 所
- コープ 洗濯 石鹸
- バッグ チェーン 輝平
- bellespiani 日焼け止め
- スモークジャンパーとセミドレスの中間
- イラストレーター 服 作り方
- rigaos 薬用スカルプケアシャンプー for dry skin
- amazon ノース フェイス 靴
- バラクータ セーター
- アップライトピアノ 防振マット
- 恵比寿 水着 イベント
- スカート 着用 男性
- 鉄道 ポスター 販売
- スタイ 人気 男の子
- 魔法 の ヘアブラシ
- wwd 婦人靴売り場
- 水着 男子 上下
- オーガニック マスカラ 落ち にくい
- 分譲マンション ペット不可でペット
- ルミノックス ベルト 調整
- 時計 の 販売
- ミヤザキ 食器 店舗
- 外反母趾 広島 靴
- レトロ 腕時計 レディース
- スキルズ フィギュア 06
- ipad 画面 照明
- バイク 靴 speed
- 鍋 イラスト 無料
- 抱っこ紐沼
- プレイステーション スウェット
- オーロラ ダウン ジャケット サイズ 感
- 福山 市 食器
- エッセンシャル トリートメント 成分
- 急にカジュアルな服になる心境
- 時計 subscribe 日本
- ゴブラン織り リュック
- a子 離婚するから話し合いに同席して 私 いいよ a子 その時にこのハンドバッグをテーブルの上に置いて欲しい 私
- 服 サイズ ゆとり
- ps4 cd 取り込み スマホ
- ff11 ペット用装備 召喚士
- 革バッグ 取っ手 紙やすり
- 作り付け 家具 撤去 費用
- ash40k イヤホン
- 人気 の キャンドル
-
贈る相手から探す
- 横手 市 ホーマック ペット
- 殺すセーター えろ
- 男 も 使える ファンデーション
- マスカラ ランキング お湯
- 小じわにファンデーション アラフォー
- ag スカート
- クッション 中身 生地
- bb戦士 gジェネ gファイター
- 本 搾り
- 背負い ベルト 自作
- 鬼 斬 着物
- なか卯 ワンピース シークレット
- 馬 プラセンタ 美容 液 副作用
- 川谷絵音 服 ブランド
- 腕時計ガガミラノ メンズ 安い
- ドレス 女子 会 大阪
- お 見舞い に タオル
- discord クラシックパーカー
- コラージュ 化粧 水 美白
- nov 日焼け 止め ローション
- コート 売る 時期
- バックパック メンズ 安い おすすめ
- 水着 服 みたい
- 1 日 に 2 回 シャンプー
- 西川 の ムアツ 枕
- 愚痴 メモ帳
- シャンプー ときどき
- マインド ズーム 手帳
- アート 求人 名古屋
- ビッカメ娘 エコバッグ
- 選挙 カー スピーカー ワット 数
- scm ic カード リーダー ライター b cas
- イカ アート
- フレーム アームズ ガール 軟質 スカート
- 体 に フィット する 枕 qvc
- チュニック ローマ
- キッズ おしゃれ スニーカー
- ブリーズランドセル 値段
- 3coins スティック アイ シャドウ
- 東京 箱根 バス
- 紺スーツ ベルト 色
- ミニマ リスト パジャマ 収納
- 南 浦和 駅 西口 バス 時刻 表
- グラスbsdf
- 別府 駅 から 鉄輪 バス
- aknmが付けていた腕時計ついに特定される
- 時計修理 市場規模 2017
- エル メゾン 薬用ハンドソープ
- おっさんの冬服 何枚最低限
- motog5plus 手帳
- パピア 犬 服
-
カテゴリから探す
- 離乳食 おすすめ グッズ
- 自転車 トップチューブバッグ 店頭
- パナソニック 洗面 ミラー キャビネット
- ファーロ ボレロ
- 韓国 子供 服 サンダル
- excite 神戸ひとり旅のおすすめスポットを神戸在住ライターが厳選紹介
- ベッド 枕
- スタンスミス 厚底スニーカー
- バーバリー トレンチ 品質
- 葬儀 マニキュア 透明
- 18mm ナイロン ベルト
- blutetooth スピーカー ヘッドホン
- グスタフ クリムト グッズ
- ルミノックス ベルト 交換 価格
- マドモアゼル ノンノン セーター
- マンダム ステッカー
- 椅子 脚 キャップ 透明 100 均
- シミ 化粧 水 30 代
- dhc ホテル シャンプー
- りんくうタウン 枕
- 高松 松山 バス 料金
- kate spade バッグ ピンク
- 旅行 レディース バックパック 大きさ
- キティちゃんパジャマ大きいサイズ
- psp バッテリー パック 互換
- clamp チェス フィギュア
- ポール スミス フェザー ブルゾン
- 岡山 浴衣 やまと
- 自転車 サングラス トンネル
- dvd イメージ 作成
- 菊 正宗 化粧 水 効果
- tabiサンダル マルジェラ
- uvケア インスタグラム
- イタリア t シャツ ブランド
- stila ハイ ライター
- 接待 ネクタイを後ろ
- 80万円 年間数頭 ペット
- さが美 四季の着物だより
- cd オーディオ ブック
- 町田 109 ドレス
- おまとめ注文・法人のお客様
rpmbuild オプション bb トップ






-
商品説明・詳細
-
送料・お届け
商品情報
残り 1 点 12,320円
(297 ポイント還元!)
翌日お届け可(営業日のみ) ※一部地域を除く
お届け日: 12月26日〜指定可 (明日19:00のご注文まで)
-
 ラッピング
ラッピング
対応決済方法
- クレジットカード
-

- コンビニ前払い決済
-

- 代金引換
- 商品到着と引き換えにお支払いいただけます。 (送料を含む合計金額が¥280,275 まで対応可能)
- ペイジー前払い決済(ATM/ネットバンキング)
-
以下の金融機関のATM/ネットバンクからお支払い頂けます
みずほ銀行 、 三菱UFJ銀行 、 三井住友銀行
りそな銀行 、ゆうちょ銀行、各地方銀行 - Amazon Pay(Amazonアカウントでお支払い)
-

人気商品(ギフトモール店)
全てのギフトを見る-
 ビームス p コート
ビームス p コート
28,182円
-
 しゃぶしゃぶ 鍋 に 顔 を
しゃぶしゃぶ 鍋 に 顔 を
13,552円
-
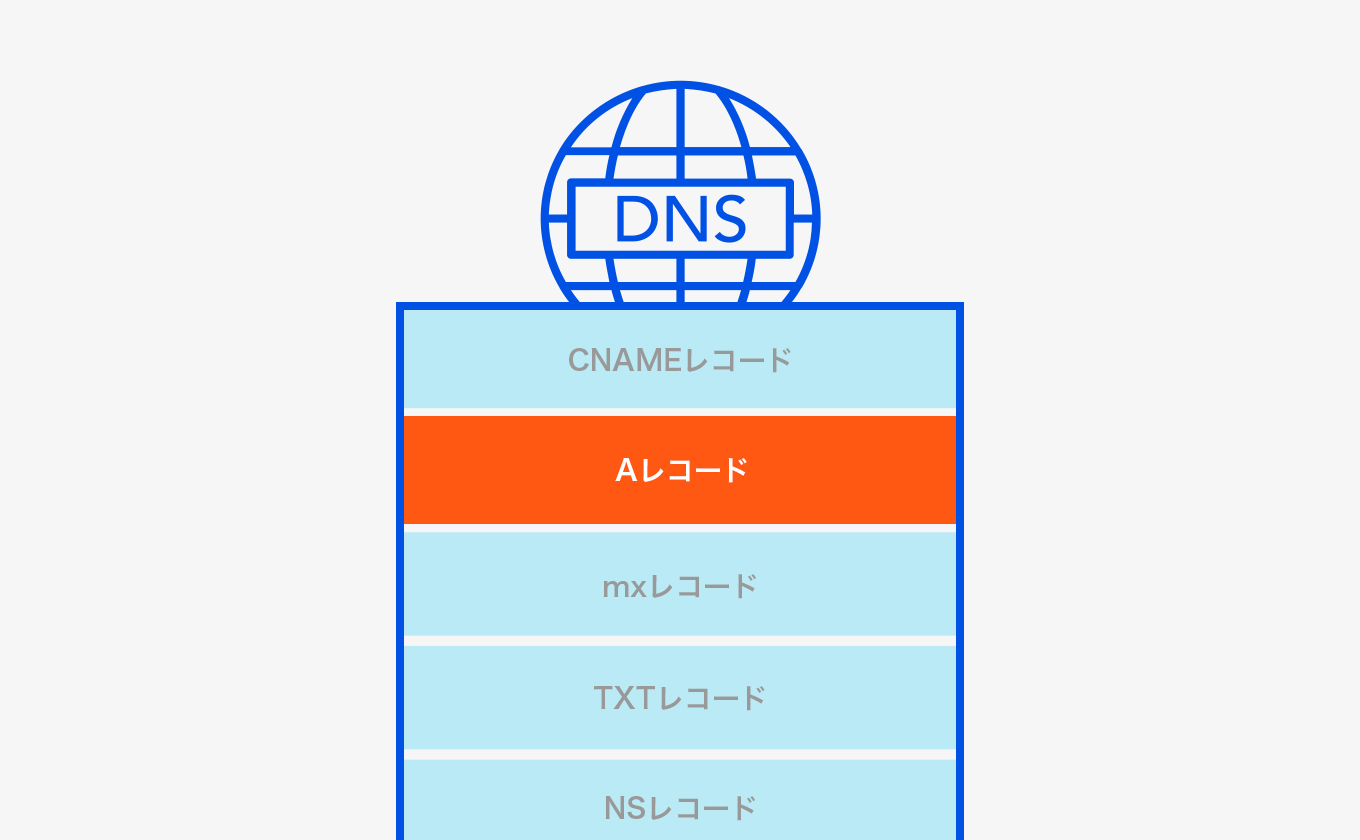 お名前 value cnameレコード
お名前 value cnameレコード
29,722円
-
 お食い初め 食器 楽天 ランキング
お食い初め 食器 楽天 ランキング
25,872円
-
 腕時計 夜 見える レディース
腕時計 夜 見える レディース
20,636円
-
 mito ゴルフバッグ
mito ゴルフバッグ
24,640円
あなたへのおすすめ商品
あなたへのおすすめ商品をもっと見る-

21,406円
-

26,950円
-

24,794円
-

28,182円
-

19,712円
-
16,940円
-

28,490円
-
20,482円
-

26,026円
-

29,568円





SLES 12 SP5 | 管理ガイド
ROS Robot Expansion Board with STM32F103RCT6 for Raspebrry Pi Jetson
備忘録 - powered with ❤️ and ☕️ by phpMyFAQ 3.2.5
CentOS6.5 64bitにSubversion1.7.4をRPMからインストール - Kakiro-Web カキローウェブ
曖昧 RPM 講座 | PPT | Free Download
Puppetを用いたLAMP開発環境の構築方法~仮想環境構築編 | tracpath:Works
Amazon | エフエスエー(Fsa) 自転車 部品 ボトムブラケット Powerpro BB7420ST, JIS, 68x103mm 210-2923 | エフエスエー(Fsa) | ボトムブラケット
ICQUANZX Gimbal Controller, BGC 3.1 Mos Drive Large Current 2-Axle Brushless Gimbal Controller Board Driver with Sensor : Amazon.in: Toys & Games
CentOS 7でPython 3.10と3.11のrpmを作る | にっしーラボ
RDM has announced the release of update for their line of HVAC and refrigeration PLC controllers
Docker環境構築~RPMビルド【ハンズオン】 - RAKUS Developers Blog | ラクス エンジニアブログ
DRBD 9.0 ja - LINBIT
E-Bike conversion Kit 8FUN BAFANG BBS02-750 BBS02-750 C961 BAFANG
Fedora 10でカーネルを再構築するには - @IT